
We have some exciting updates to SayCan! Together with the updated paper, we're adding new resources to learn more about this work: Interactive site: sites.research.google/palm-saycan Blog posts: blog.google/technology/ai/… and ai.googleblog.com/2022/08/toward… Video: youtube.com/watch?v=E2R1D8…
We have some exciting updates to SayCan! Together with the updated paper, we're adding new resources to learn more about this work: Interactive site: sites.research.google/palm-saycan Blog posts: blog.google/technology/ai/… and ai.googleblog.com/2022/08/toward… Video: youtube.com/watch?v=E2R1D8…
1) We updated the underlying LLM to PaLM (arxiv.org/abs/2204.02311), resulting in PaLM-SayCan. This resulted in an interesting trend: Improving the underlying LLM resulted in much higher robotics (!) performance (halving the errors)

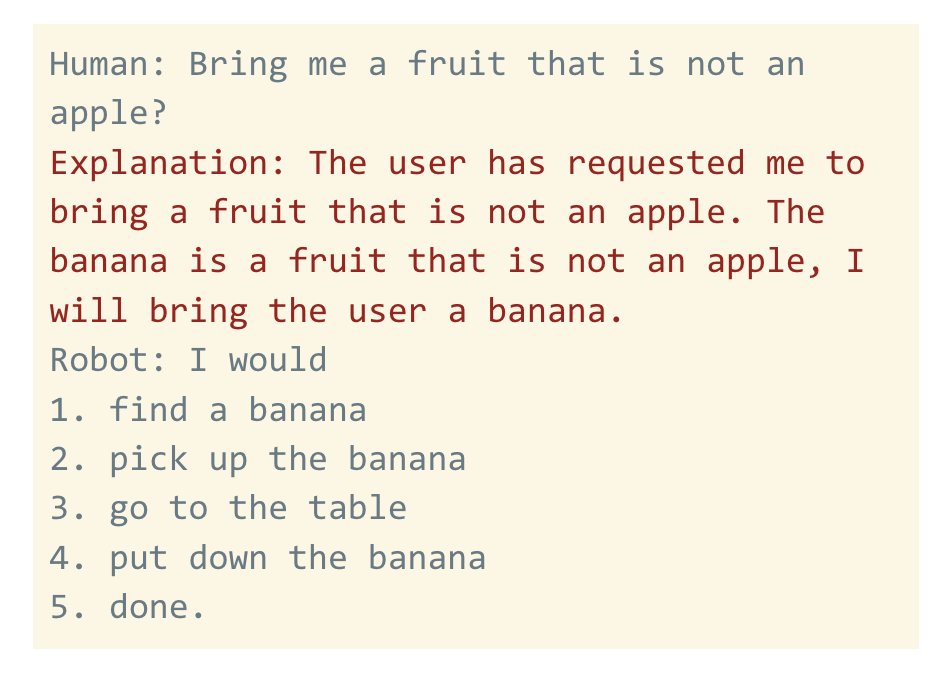
2) With PaLM-SayCan, we got new LLM capabilities for free such as: chain-of-thought prompting (arxiv.org/abs/2201.11903) or handling multilingual queries. This is really exciting as we can attach ourselves to the progress of LLMs for the future 📈!

3) We added new skills that allow the robot to operate drawers (open/close, get things in and out of them). This allows us to execute queries such as "Can you get me the chips out of the drawer?"