Mei Han @_iMeiMei
Ph.D. student @ UIUC | M.S. @ NUS | B.Eng. @ XDU ✨🤖🧠🦾 Urbana-Champaign, IL Joined June 2020-
Tweets49
-
Followers119
-
Following1K
-
Likes953
Check out new work from the group on data-efficient learning of symbolic world models!
Check out new work from the group on data-efficient learning of symbolic world models!

A year ago we introduced EgoMimic. Now I'm excited to share a major update: Egocentric Human Data for Mobile Manipulation Robot teleop is costly. Scaling mobile manip teleop is borderline impossible. Can we learn mobile manipulation from human data? The answer is Yes. Our…
A year ago we introduced EgoMimic. Now I'm excited to share a major update: Egocentric Human Data for Mobile Manipulation Robot teleop is costly. Scaling mobile manip teleop is borderline impossible. Can we learn mobile manipulation from human data? The answer is Yes. Our…
How do we unlock the full dexterity of robot hands with data, even beyond what teleoperation can achieve? DEXOP captures natural human manipulation with full-hand tactile & proprio sensing, plus direct force feedback to users, without needing a robot👉dex-op.github.io

🏓🤖 Our humanoid robot can now rally over 100 consecutive shots against a human in real table tennis — fully autonomous, sub-second reaction, human-like strikes.

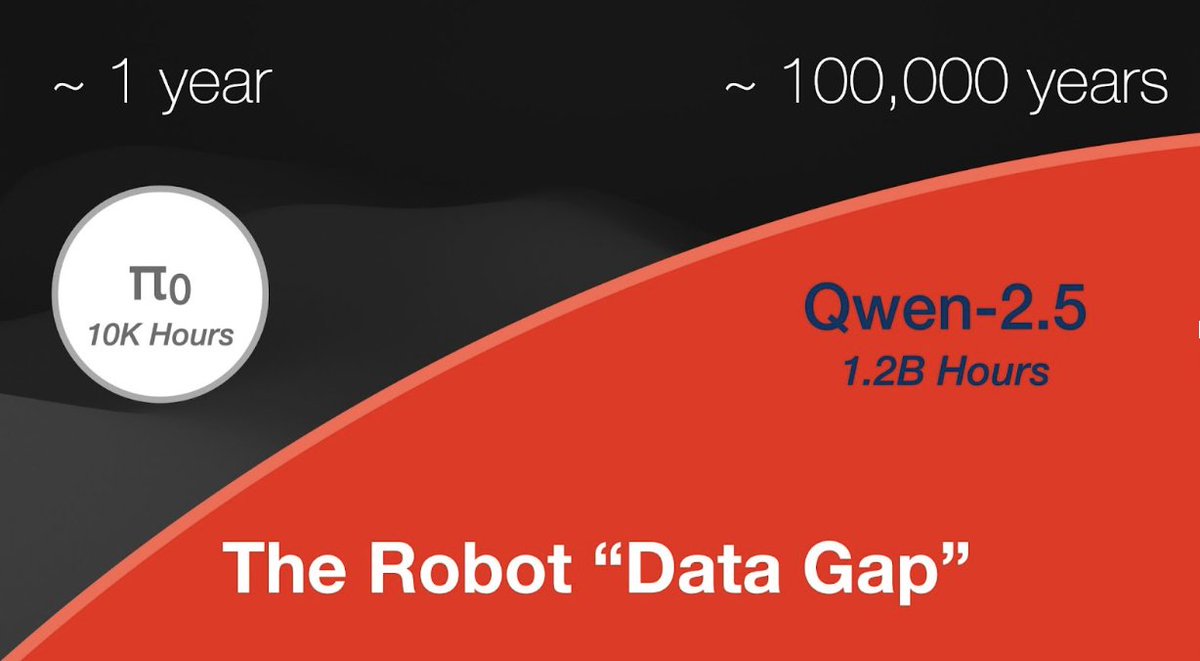
Good Old-Fashioned Engineering Can Close the 100,000-Year “Data Gap” in Robotics. Science Robotics Editorial: science.org/doi/10.1126/sc…

How do we learn motor skills directly in the real world? Think about learning to ride a bike—parents might be there to give you hands-on guidance.🚲 Can we apply this same idea to robots? Introducing Robot-Trains-Robot (RTR): a new framework for real-world humanoid learning.

Perceive, plan, and execute

Perceive, plan, and execute
@svlevine Good article. I have three comments: 1. With any hard optimization problem, if you can get into the right ballpark, you save a lot of time searching around. I think that's where human demonstration really helps. 2. When a human watches Roger Federer, they get the gist of what…

We’ve all seen humanoid robots doing backflips and dance routines for years. But if you ask them to climb a few stairs in the real world, they stumble! We took our robot on a walk around town to environments that it hadn’t seen before. Here’s how it works🧵⬇️

We now test our humanoid robots by having its onboard neural network play games that challenge its intelligence and fine motor skills

Control Shift: New Reality Labs Research on sEMG Published in ‘Nature’ meta.com/blog/reality-l…

How can we leverage diverse human videos to improve robot manipulation? Excited to introduce EgoVLA — a Vision-Language-Action model trained on egocentric human videos by explicitly modeling wrist & hand motion. We build a shared action space between humans and robots, enabling…

What are robot world models Read more: open.substack.com/pub/itcanthink…

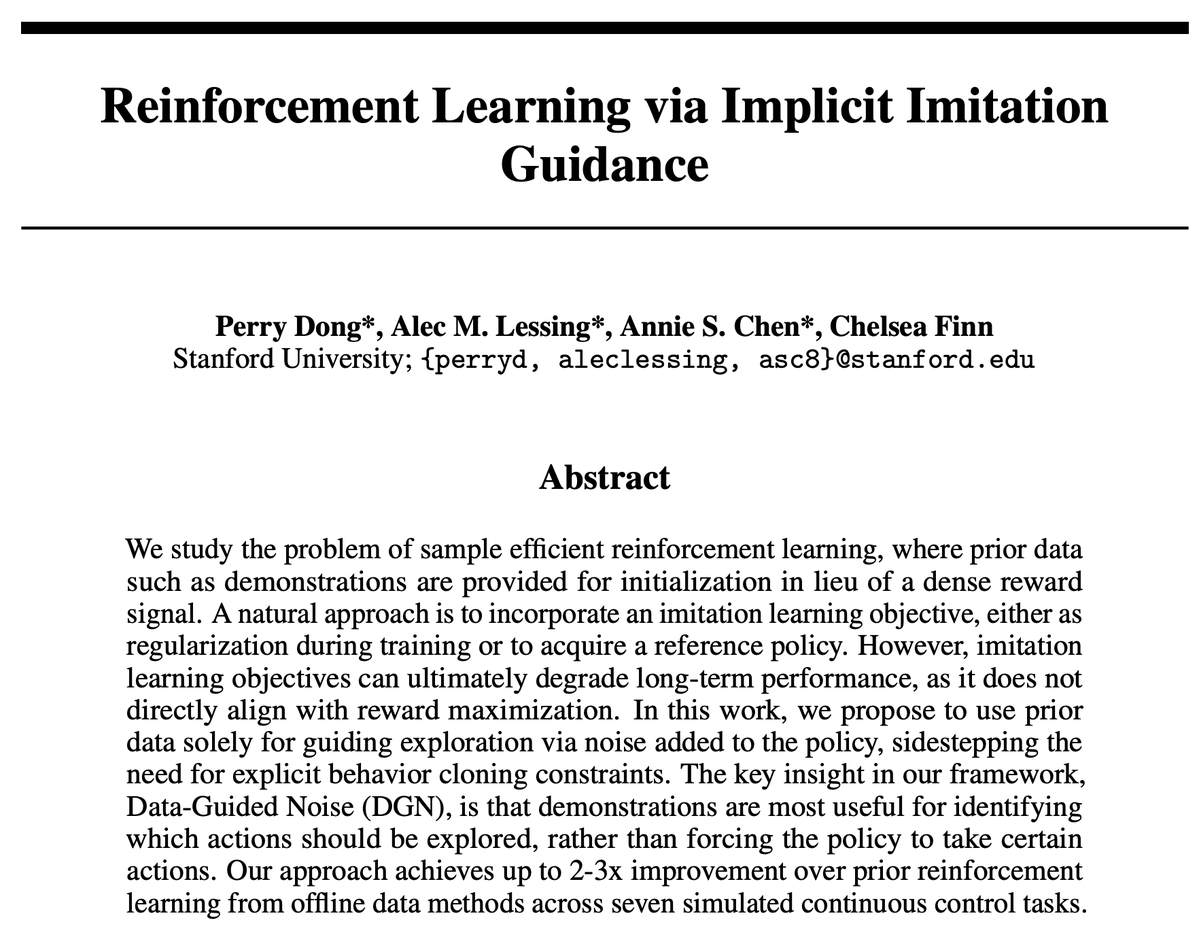
How should an RL agent leverage expert data to improve sample efficiency? Imitation losses can overly constrain an RL policy. In RL via Implicit Imitation Guidance, we show how to use expert data to guide more efficient *exploration*, avoiding pitfalls of imitation-augmented RL

If you have a policy that uses diffusion/flow (e.g. diffusion VLA), you can run RL where the actor chooses the noise, which is then denoised by the policy to produce an action. This method, which we call diffusion steering (DSRL), leads to a remarkably efficient RL method! 🧵👇

What would a World Model look like if we start from a real embodied agent acting in the real world? It has to have: 1) A real, physically grounded and complex action space—not just abstract control signals. 2) Diverse, real-life scenarios and activities. Or in short: It has to…

🤖 Can a humanoid robot hold extreme single-leg poses like Bruce Lee's Kick or the Swallow Balance? 🤸 💥 YES. Meet HuB: Learning Extreme Humanoid Balance 🔗 Project website: hub-robot.github.io
Command humanoids *directly* with natural language? Introducing LangWBC, a generative, end-to-end policy that turns natural language into real-world whole-body humanoid control! 💬→🦿Smooth, robust, surprisingly intuitive! See more 👉 LangWBC.github.io #RSS2025

Can we prompt robots, just like we prompt language models? With hierarchy of VLA models + LLM-generated data, robots can: - reason through long-horizon tasks - respond to variety of prompts - handle situated corrections Blog post & paper: pi.website/research/hirob…

Time to democratize humanoid robots! Introducing ToddlerBot, a low-cost ($6K), open-source humanoid for robotics and AI research. Watch two ToddlerBots seamlessly chain their loco-manipulation skills to collaborate in tidying up after a toy session. toddlerbot.github.io

Lingdong Kong @ldkong1205
1K Followers 497 Following - PhD Candidate @NUSComputing 🦁 - 2025 @Apple PhD Scholar in AI/ML - 3D Scene Perception, Generation, and World Modeling


Zhaoxi Chen @Frozen_Burning
1K Followers 951 Following Ph.D. student @MMLabNTU | Neural Rendering & 3D Generation | Ex Intern @RealityLabs | Undergrad @Tsinghua_Uni
Yoram Bachrach @yorambac
3K Followers 7K Following Research Scientist at Meta (prev Google DeepMind and Microsoft Research). Working on LLM Agents and Multi-Agent Systems.



Zhenjun Zhao @zhenjun_zhao
6K Followers 1K Following PhD from @CUHKofficial. 3D vision, SLAM, SfM, Image Matching (https://t.co/ek376Drwvu).
Ryan Punamiya @ryan_punamiya
139 Followers 178 Following unjustifiably risky. @GeorgiaTech @ICatGT. robotics researcher advised by @danfei_xu @judyfhoffman


Xuan Ju @juxuan_27
139 Followers 143 Following Ph.D. Candidate @cuhkcse, Research Intern @Adobe. Previous Intern @Kling_ai, @AIatMeta, @TencentGlobal ARC, @IDEA, @SenseTime_AI
Rhonda @jonesrhonda33
314 Followers 3K Following
Zhikai Zhang @Zhikai273
187 Followers 148 Following 2nd year Ph.D student at IIIS, Tsinghua University


Samuel Jin @SamuelJin234500
9 Followers 150 Following Incoming PhD @ Cornell, BSEE from UIUC Working on Robot Manipulation/Learning + Tactile Sensing
OpheliaIngersoll @ZaUrfHvwK3zxc5w
19 Followers 390 Following
Jiaxin Lu @jacinth_lu
296 Followers 372 Following PhD student @UTCompSci | previously ACM Class 2018, SJTU | film lover | she/her
Zhefei Gong @zhefeigong
151 Followers 2K Following Robot Learning | Looking for 2026 Spring/Fall Phd Opportunities

i2RT Robotics @i2rt_robotics
1K Followers 375 Following Open-source, robust robotic hardware that you can actually deploy in real world.
Junyao Shi @JunyaoShi
793 Followers 894 Following 🤖PhD @Penn @GRASPlab @SkildAI, Previously @Columbia | Robot Learning

Hertha Brakus @BrakusHert89056
1 Followers 74 Following
Xinyu Yang @Xinyu2ML
1K Followers 1K Following Ph.D. @CarnegieMellon. Working on agentic foundation model systems. Founder of the FM-Wild workshop series and the ASAP seminar series. They/Them
Lawrence Yunzhou Zhu @LawrenceZhu22
224 Followers 151 Following MSCS Student, @gtcomputing @GeorgiaTech, advised by @danfei_xu. Egocentric imitation learning, Mobile manipulation
Allen School @uwcse
11K Followers 3K Following The Paul G. Allen School of Computer Science & Engineering educates tomorrow's innovators while developing solutions to humanity's greatest challenges.
Sushil Pokhrel @sushilpokhrel
3K Followers 6K Following Biomedical Engineering researcher turned Systems Designer, Machine learning, ai +Robotics+systems +design ,cryptography etc. Felt in love with ML
Hao-Shu Fang @haoshu_fang
2K Followers 450 Following Postdoc @ MIT CSAIL | PhD @ SJTU | MSRA/Baidu/ByteDance PhD Fellowship | Research interests focus on robot learning and vision.

Aaron Wetzler @aaronwetzler
464 Followers 3K Following the robots are coming . previously eng lead@apple, cto@camerai, phd@technion
Charlie Cheng @charlietcheng
290 Followers 905 Following EECS undergrad @ UC Berkeley | Researcher @ BAIR with @pabbeel and @JitendraMalikCV | Humanoid & RL | https://t.co/a4Axs3xaUi | opinions my own
Yan Zhang @cnsdqzyz
2K Followers 1K Following Scientist@meshcapade, human foundation models, my own opinions.
Fu-En (Fred) Yang @FuEnYang1
618 Followers 1K Following Research Scientist @NVIDIAAI | Ph.D. @NTU_TW | Prev. Research Intern @NVIDIAAI | Vision & Language | Multimodal AI

Wenjia Wang @WenjiaWang_HKU
87 Followers 137 Following PhD student @ HKU, CGVU lab since Jan 2023. Supervised by Prof. Taku Komura

Jin Cheng ✈️ Huma... @catachiii
760 Followers 666 Following Doctoral Student with @crl_ethz @ETH, working on RL, robotics, and more | Previously @MPI_IS @Tsinghua_Uni - Cells interlinked within cells, interlinked.
Xiao Chen @XiaoChen_Twi
369 Followers 812 Following Ph.D. Student @ MMLab, @CUHK_official | B.Eng.@ZJU_China | 3D Vision & Robot Learning
Huayi Wang @HuayiWang04
164 Followers 128 Following Hi! I am a third-year ungraduate at @sjtu1896. I am interested in Robot Learning and Embodied AI. Website: https://t.co/S5lYcsru7n
Shivam Vats @ CoRL202... @ShivaamVats
741 Followers 517 Following Postdoc @BrownBigAI Previously: PhD @CMU_Robotics, Maths @IITKgp, Core developer @SymPy
Hongyu Li @Hongyu_Lii
614 Followers 717 Following Robotics researcher at @BrownCSDept 🐻& @rai_inst. | Prev: @AmazonScience, @Honda, @KhouryCollege, @rpi
Runhan Huang @RunhanH
27 Followers 198 Following Undergrad in @Tsinghua_IIIS, Yao Class | Robot Learning, Generative AI | Phd 26 Applicant
Asad @AsadAliShahid
48 Followers 300 Following
Shao-Hua Sun @shaohua0116
4K Followers 1K Following Assistant Professor @ National Taiwan University (NTU) | CS Ph.D. @USC | Robot Learning, Reinforcement Learning, Program Synthesis | 台大電機系助理教授
Erdem Bıyık @ebiyik_
3K Followers 781 Following Asst Prof @CSatUSC (cc @USC, @USCViterbi). Research on AI/ML for Robotics & HRI. Previously @CHAI_Berkeley, @StanfordAILab, @Google, @BilkentUniv.
WestlakeRobotics @westlake_robot
146 Followers 4 Following
Zhaoxi Chen @Frozen_Burning
1K Followers 951 Following Ph.D. student @MMLabNTU | Neural Rendering & 3D Generation | Ex Intern @RealityLabs | Undergrad @Tsinghua_Uni
Yoram Bachrach @yorambac
3K Followers 7K Following Research Scientist at Meta (prev Google DeepMind and Microsoft Research). Working on LLM Agents and Multi-Agent Systems.
Lukas Höllein @LukasHollein
529 Followers 172 Following PhD Student Visual Computing Group @TU_Muenchen | 3D Generative AI / 3D Reconstruction / Neural Rendering / Style Transfer / NeRF & CUDA
Anpei Chen @AnpeiC
621 Followers 336 Following Postdoc at the University of Tuebingen @AutoVisionGroup and ETH Zurich @ETH_en
Songming Liu @songming_liu
606 Followers 88 Following CS PhD at @Tsinghua_Uni, focusing on building large-scale robotic datasets and training large models for generalizable robotic manipulation.

Siheng Zhao @SihengZhao
353 Followers 294 Following CS PhD student @USC; intern @Amazon (Frontier AI & Robotics); prev. @XLangNLP

Miles Macklin @milesmacklin
3K Followers 750 Following Senior Director, Simulation Technology @NVIDIA. Physics simulation, robotics, GPUs. Currently working on Newton and NVIDIA Warp https://t.co/8LwMOr3sST.
Eric Heiden @eric_heiden
605 Followers 970 Following Research in robotics and simulators @NVIDIA. Building Newton https://t.co/q7OoFm5id6.
Peter Yichen Chen @peterchencyc
625 Followers 410 Following Assistant Prof @UBC | PhysAI Lab Alum: @MIT, @Columbia, @UCLA, @RealityLabs, @weta_digital
Jeff Clune @jeffclune
29K Followers 431 Following Professor, CS, U. British Columbia. CIFAR AI Chair, Vector Institute. Sr. Advisor, DeepMind | ML, AI, deep RL, deep learning, AI-Generating Algorithms (AI-GAs)
Tom Silver @tomssilver
3K Followers 335 Following Assistant Professor @Princeton. Developing robots that plan and learn to help people. Prev: @Cornell, @MIT, @Harvard.
Kostas Daniilidis @KostasPenn
5K Followers 1K Following Ruth Yalom Stone Professor @Penn @PennEngineers @PennCIS @GRASPlab
Heng Yang @hankyang94
5K Followers 552 Following Assistant Professor @Harvard SEAS @hseas, Lead the Harvard Computational Robotics Lab. #Robotics, #Optimization, #Control, #Vision, #Learning
Cohere Labs @Cohere_Labs
24K Followers 251 Following @Cohere's research lab and open science initiative that seeks to solve complex machine learning problems. Join us in exploring the unknown, together.
Michael Yuan @michaelyuancb
223 Followers 114 Following Master student at @Tsinghua_IIIS with Prof. @gao_young, working on EmbodiedAI and 3DV 🐣. I welcome exploration, creation and excitement🦄.
Ryan Punamiya @ryan_punamiya
139 Followers 178 Following unjustifiably risky. @GeorgiaTech @ICatGT. robotics researcher advised by @danfei_xu @judyfhoffman

Chengshu Li @ChengshuEricLi
617 Followers 47 Following Member of Technical Staff @OpenAI PhD @StanfordSVL @StanfordAILab Stanford B.S. in Computer Science 17' Robot enthusiast
Xiao Ma @yusufma555
707 Followers 529 Following Staff Research Scientist @ ByteDance Seed, working on robot foundation models. Prev: Research @Dyson | PhD @NUSingapore. All views are my own.
Galaxea Dynamics @GalaxeaDynamics
849 Followers 35 Following Working on humanoids and mobile manipulation. In scaling law, we trust. Website: https://t.co/pD9y5BhuLP
Galaxea @Galaxea_x
147 Followers 6 Following Galaxea Robotics, Embodied Agents Serving the World. Hardware brand @galaxeadynamics
Chen Geng @gengchen01
884 Followers 823 Following CS Ph.D. Student @Stanford. Previously Hons. B.Eng. in CS @ZJU_China.
Zhenjun Zhao @zhenjun_zhao
6K Followers 1K Following PhD from @CUHKofficial. 3D vision, SLAM, SfM, Image Matching (https://t.co/ek376Drwvu).

Lindon Gao @Lindon_Gao
983 Followers 18 Following Cofounder & CEO @DynaRobotics, Caper AI ($350m exit)

Yu Lei @_OutofMemory_
233 Followers 2K Following EE @SJTU1896 | Previous Intern@CMU_Robotics; @UCSD. Learn to learn representations and learn to search within and beyond. 🤖🧠👁️
Shaofeng Yin @Shaofeng_Yin
44 Followers 291 Following Undergraduate researcher at Tsinghua University, focusing on World Models and Robotics. Current intern @StanfordSVL. My site: https://t.co/R9bicUDDdk
Christopher Agia @agiachris
566 Followers 50 Following PhD in Computer Science candidate @Stanford. My interests span learning for robotic planning, control, vision systems, and their interfacing representations.
Hanbyul (Han) Joo @jhugestar
957 Followers 346 Following Assistant Professor, Seoul National University (SNU) Previously, Research Scientist, Facebook AI Research PhD student RI CMU https://t.co/vVaNVzsJCI
Hyeonwoo Kim @Hyeonwoo__Kim
49 Followers 16 Following MS/PhD student @ SNU VCLab | Human-Object Interaction / Generative Models
Xuan Ju @juxuan_27
139 Followers 143 Following Ph.D. Candidate @cuhkcse, Research Intern @Adobe. Previous Intern @Kling_ai, @AIatMeta, @TencentGlobal ARC, @IDEA, @SenseTime_AI
Amir Bar @_amirbar
2K Followers 1K Following Research Scientist, FAIR (Meta). Prev: Postdoc. PhD @TelAvivUni @berkeley_ai

Dvij Kalaria @DvijKalaria
313 Followers 345 Following Ongoing PhD @UCBerkeley @berkeley_ai | MS @CMU_Robotics | UG @IITKgp | Research in Robot Learning
Siddharth Ancha @siddancha
515 Followers 408 Following Research Scientist @UCBerkeley | Postdoc @MIT_CSAIL @MIT | PhD from @SCSatCMU @CarnegieMellon | I work on Robotics 🤖
Phil Trubey @PTrubey
9K Followers 596 Following Looking for AI startups with fundamental technology.
Humanoid @TheHumanoidAI
3K Followers 46 Following First AI and robotics company in the UK, creating the world’s leading, commercially scalable, and safe humanoid robots
CoCoSci MIT @MITCoCoSci
4K Followers 107 Following Computational Cognitive Science Group | MIT | BCS Latest updates from Josh Tenenbaum's lab + Alumni
Association for Compu... @TheOfficialACM
72K Followers 3K Following The world's largest professional organization advancing #computing as a science and profession. Also @mastodon.acm.org Likes & shares ≠endorsement
ACM SIGGRAPH @siggraph
43K Followers 2K Following Official Twitter for @TheOfficialACM's Special Interest Group on Computer Graphics & Interactive Techniques + its conferences. #SIGGRAPH2025 #SIGGRAPHAsia2025
Ethan Weber @ethanjohnweber
921 Followers 584 Following AI Research Scientist at Meta Reality Labs (in Zurich) | PhD at UC Berkeley | MIT EECS BS '20 & MEng '21 | CV for AR/VR & robotics | https://t.co/YhPzCHLcqi
Zhikai Zhang @Zhikai273
187 Followers 148 Following 2nd year Ph.D student at IIIS, Tsinghua University
Ritwik Gupta 🇺🇦 @Ritwik_G
2K Followers 868 Following Post-doc @berkeley_ai | Incoming Assistant Professor @umdcs | Technical Director @DIU_x
General Robotics @genrobotics_ai
2K Followers 21 Following General Robotics—building general purpose intelligence for every robot.Trends for United States
You might like